La idea de crear un robot fue durante años, cuando la robótica pareció obsesionada con una pregunta: ¿a qué animal debería parecerse una máquina para moverse mejor? Algunos laboratorios apostaron por perros metálicos. Otros por insectos, caballos, serpientes o humanoides con piernas cada vez más sofisticadas, la naturaleza era el molde, el robot, una imitación.
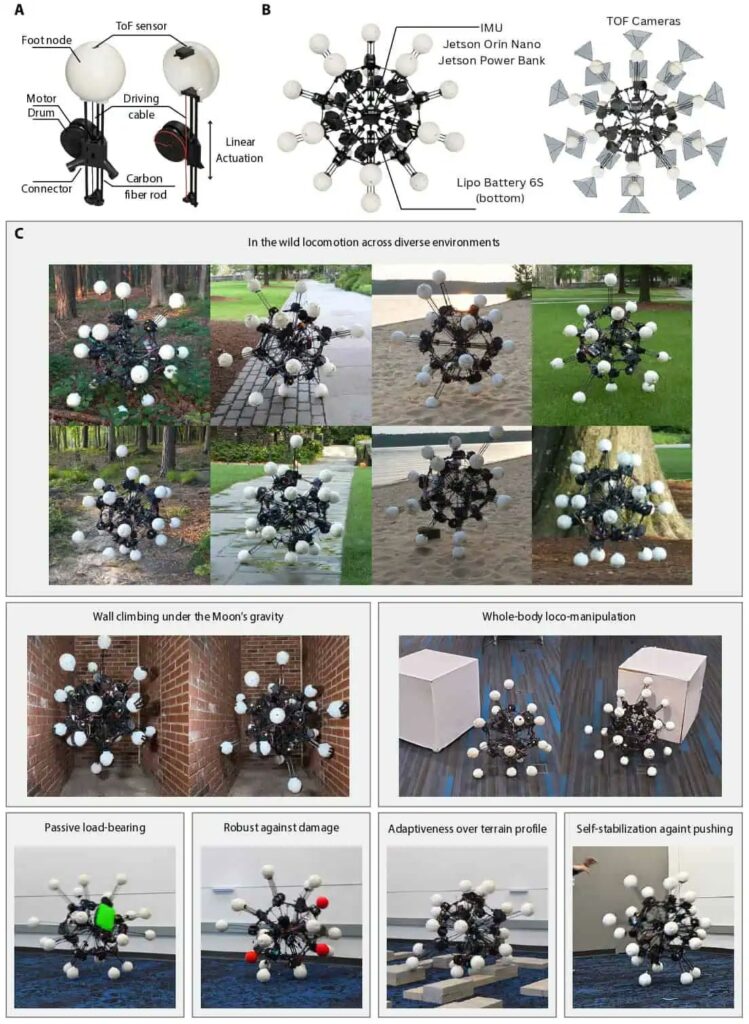
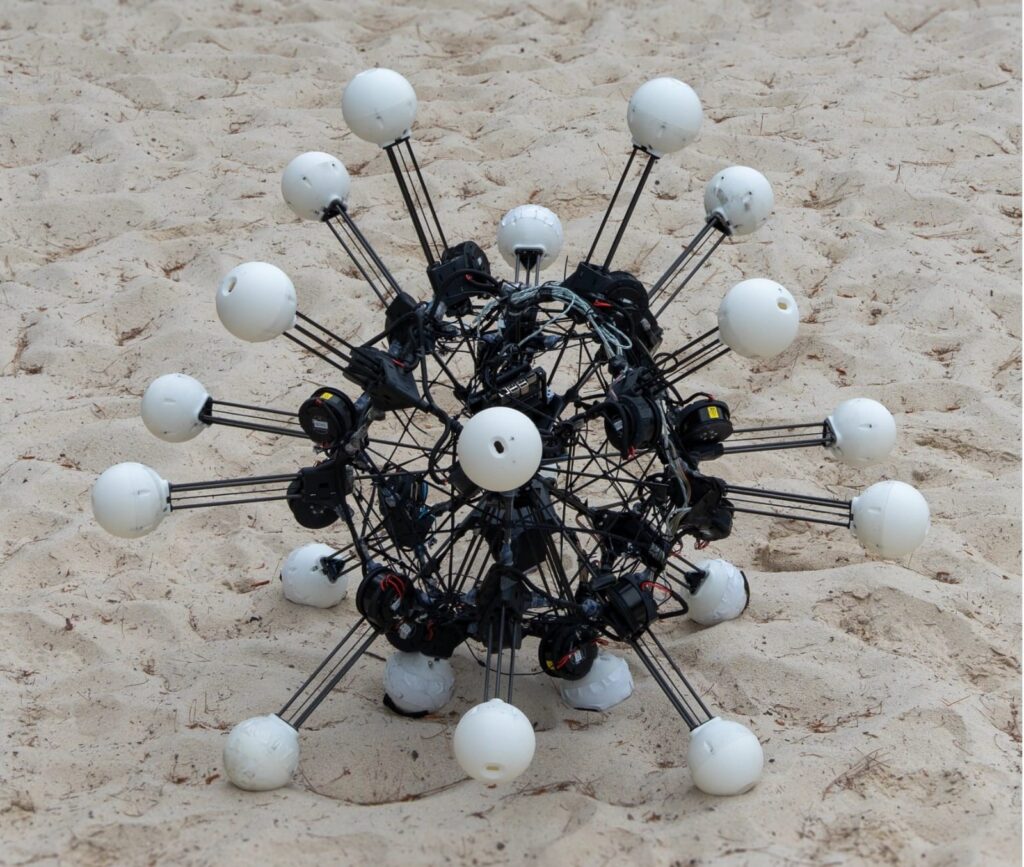
Sin embargo, un equipo de la Universidad de Duke decidió plantear otra pregunta: ¿y si el cuerpo más útil para un robot no se parece a ningún animal familiar?. La respuesta se llama Argus, es una máquina extraña, casi marina, con 20 patas telescópicas que irradian desde un cuerpo central y cámaras de profundidad en las puntas, no tiene frente ni espalda. Tampoco un “arriba” o un “abajo” definitivos. Puede moverse y ver en cualquier dirección casi al instante, como si el mundo no le exigiera orientarse antes de actuar. La investigación fue publicada en Science Robotics bajo el título Extreme dynamic symmetry enables omnidirectional and multifunctional robots.

No obstante, Argus no nació de copiar a un erizo de mar, aunque lo recuerde visualmente, nació de una idea matemática: la isotropía dinámica, el concepto mide qué tan bien puede un robot acelerar su centro de masa en cualquier dirección. Una puntuación de 1 significa que la máquina puede reaccionar de forma casi idéntica hacia delante, atrás, arriba, abajo o hacia los lados, la mayoría de robots actuales no se acercan demasiado a ese ideal. Según los investigadores, humanoides, cuadrúpedos y drones convencionales suelen quedar por debajo de 0,6 en esa métrica. Argus alcanzó 0,91, una cifra cercana al máximo teórico, eso cambia la manera de pensar el control. Un perro robot necesita saber dónde está su frente. Un humanoide también. Argus, en cambio, puede tratar casi cualquier orientación como válida. Si cae, gira o recibe un golpe, no tiene que “recuperar la postura correcta” de la misma manera que otros robots. Puede convertir otra parte de su cuerpo en base y seguir.
Sin embargo, el equipo de Duke no llegó a esta forma por capricho. En el estudio, los investigadores probaron más de 1.000 morfologías simuladas y observaron que una mayor simetría dinámica mejoraba el seguimiento de trayectorias, el éxito en tareas, la robustez, la resiliencia y la eficiencia energética.