Hoy en día, la inteligencia artificial lleva años demostrando que puede superar a los humanos en entornos donde todo está definido. Juegos como el ajedrez o el Go marcaron ese punto de inflexión en el que las máquinas dejaron de competir para empezar a dominar. Sin embargo, todo eso ocurría en un espacio controlado, donde las reglas eran claras y el entorno no cambiaba. Ahora, el salto que estamos viendo es mucho más complejo. Ya no se trata de tomar decisiones en un tablero, sino de trasladar esa inteligencia a un cuerpo que tiene que moverse, reaccionar y adaptarse en tiempo real y ahí es donde entra el tenis.
Para este robot, jugar al tenis no solo consiste en devolver una pelota. Implica interpretar trayectorias a gran velocidad, ajustar la posición del cuerpo en milésimas de segundo y coordinar movimientos con una precisión casi automática. Para un humano, ese proceso es natural. Para un robot, durante años, fue un problema prácticamente irresoluble. La dificultad no estaba en entender qué hacer, sino en ejecutarlo. La inteligencia artificial ya podía analizar situaciones complejas, pero no tenía una forma eficaz de trasladar ese análisis a un sistema físico con limitaciones reales: equilibrio, fricción, inercia, tiempo de reacción.
La robótica, con este avance le ha permitido romper esa barrera parte de una idea bastante distinta a la habitual. En lugar de entrenar al robot con datos perfectos, los investigadores decidieron utilizar movimientos humanos imperfectos como base de aprendizaje. No buscaban replicar una técnica ideal, sino construir una capacidad de adaptación. En este sentido, el sistema conocido como LATENT, se entrenó inicialmente con habilidades básicas: desplazamientos laterales, golpes de derecha y de revés, ajustes de posición. En lugar de enfrentarlo directamente a un partido completo, se redujo la complejidad del entorno, utilizando una pista mucho más pequeña para que pudiera interiorizar esos patrones fundamentales.

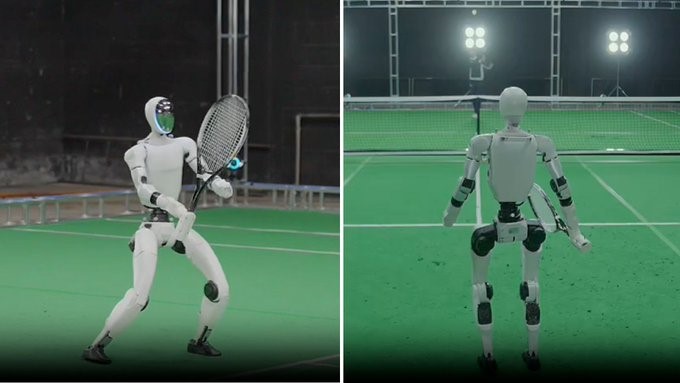
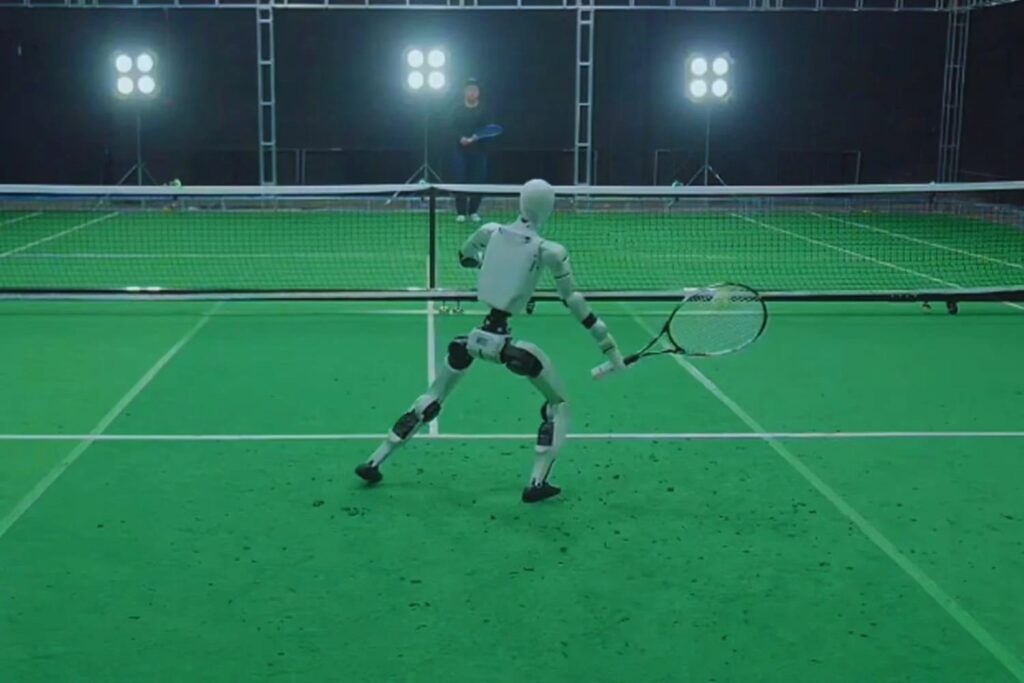
Desde ese momento, el robot empezó a hacer algo clave, como corregirse a sí mismo, ajustar el ángulo de la raqueta, modificar su postura y reaccionar de forma dinámica ante cada pelota, sin necesidad de seguir un patrón rígido. Con ese mismo aprendizaje se ha trasladado a un robot humanoide real, el Unitree G1, equipado con múltiples grados de libertad que le permiten moverse de forma relativamente fluida. En pruebas físicas, ha sido capaz de devolver pelotas a velocidades superiores a los 50 km/h y mantener intercambios básicos con jugadores humanos en una pista real.
No estamos ante un robot que vaya a competir con profesionales, ni siquiera con jugadores experimentados. Pero ese no es el objetivo. Lo importante es que ya no se trata de una simulación, sino de una interacción real con un entorno impredecible. Cada golpe implica ajustar variables que no están completamente controladas. Cada error obliga a recalcular, obviamente. Y aun así, el sistema responde.